
- Visión General
- Descripción del producto
- Parámetros del producto
- Instrucciones de instalación
- Perfil de la empresa
Información Básica.
No. de Modelo.
EA196
Condición
Nueva
Personalizado
Personalizado
Material
Aleación de aluminio
método de control
svpwm, control vectorial
método de enfriamiento
refrigeración por ventilador
panel frontal
5 teclas, led de 5 dígitos
función de comunicación
rtu modbus
límite de par
límite de ajuste digital
modo de control de comandos
mando de par digital
comando modo de suavizado
filtrado de paso bajo
límite de velocidad
límite de ajuste digital
Paquete de Transporte
Wooding
Marca Comercial
SINEE
Origen
China
Capacidad de Producción
400000sets/Year
Descripción de Producto
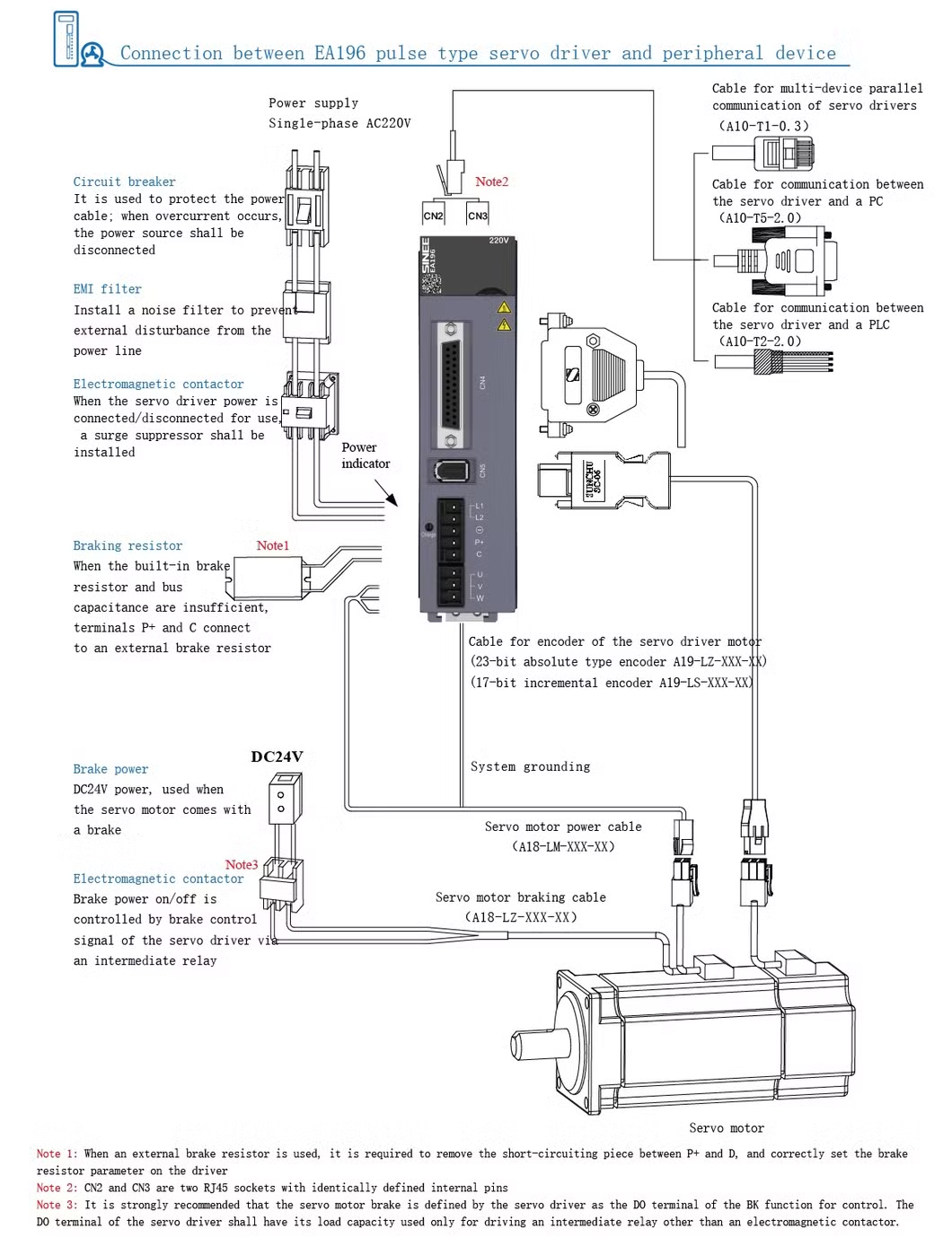
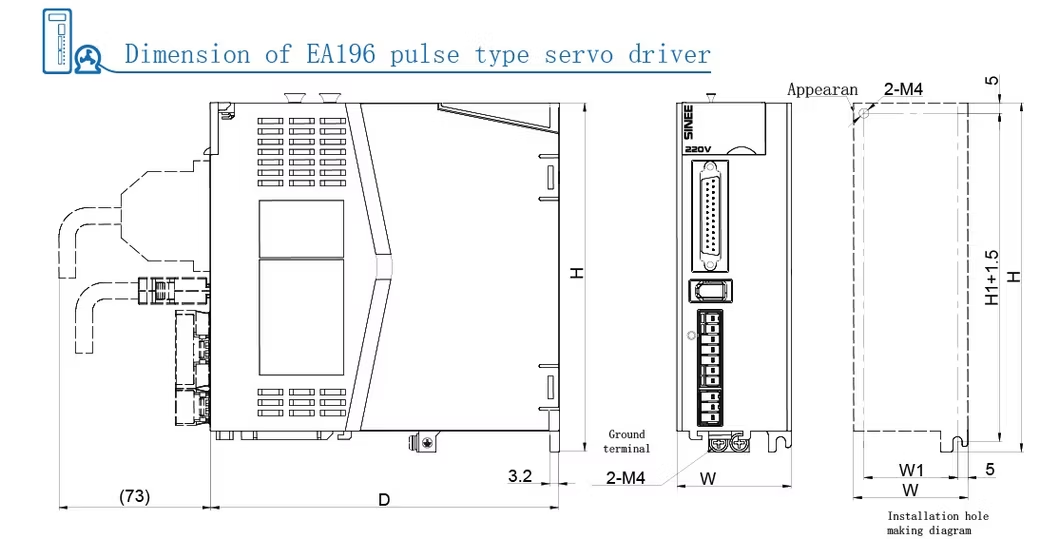
Servocontrolador serie EA196

Monofásica 220V~240V 0,2~0,75kW
•respuesta de alta velocidad
•colocación de alta precisión
•fácil de usar
1. Adopta MCU especial avanzada para control de motor y módulo de potencia PIM, que tiene las características de alta integración, pequeño tamaño, perfecta protección y alta fiabilidad.
2. El algoritmo de control PID optimizado realiza un control digital completo preciso del par, la posición y la velocidad, con una alta precisión y una respuesta rápida.
3. Cuenta con interfaces digitales ricas, soporta el protocolo de comunicación MODBUS, y es conveniente para la conexión en red.
La serie 4. EA196 admite varios servomotores de imán permanente ac con codificadores magnéticos y fotoeléctricos incrementales de 17 bits y codificadores fotoeléctricos absolutos de 23 bits que utilizan el protocolo RA-CODER, cumpliendo con diferentes requisitos de coste y rendimiento.
5. Puede ser ampliamente utilizado en campos de automatización como equipos 3C, maquinaria de impresión y embalaje, maquinaria textil, robots y líneas de producción automatizadas.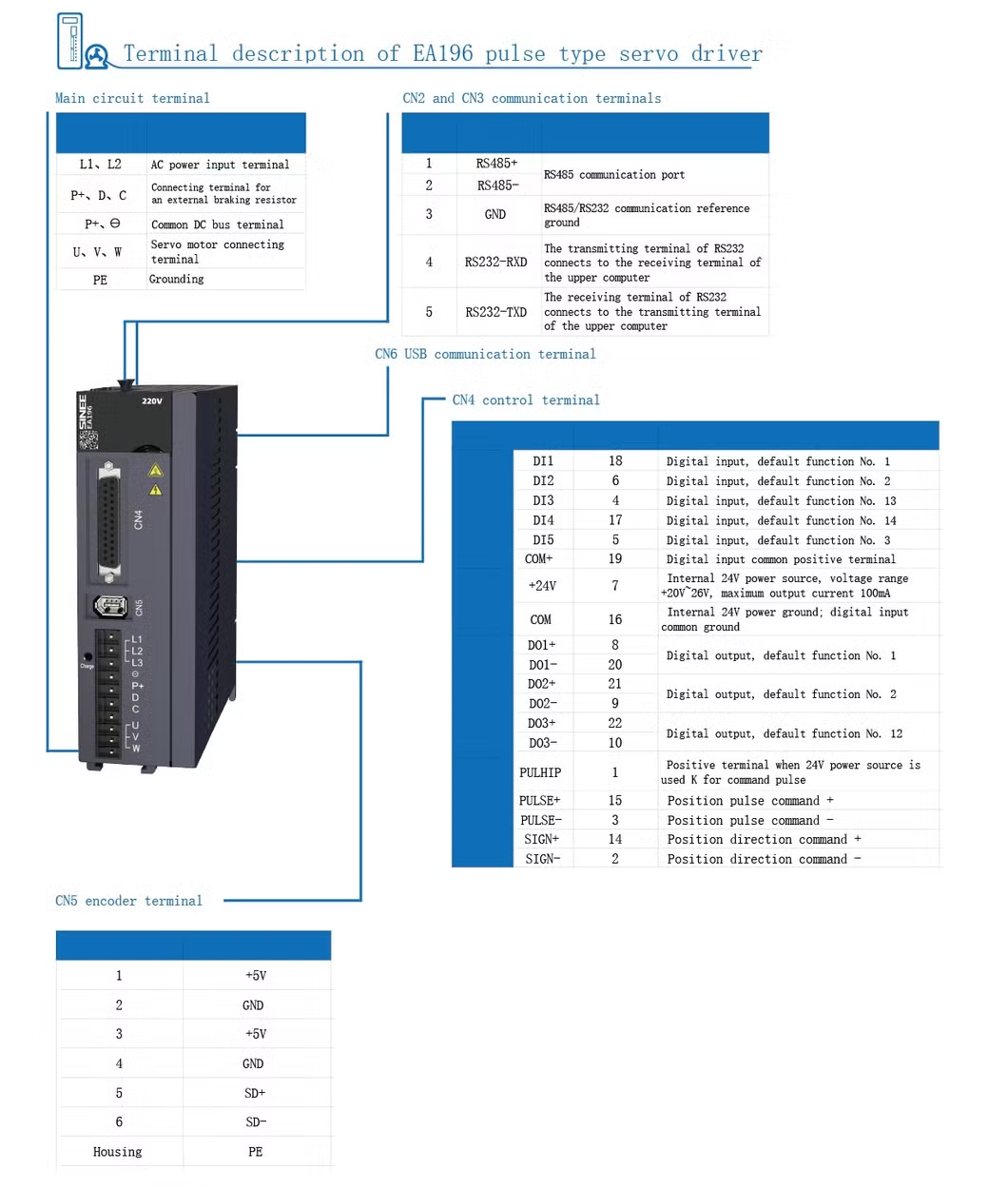





Monofásica 220V~240V 0,2~0,75kW
•respuesta de alta velocidad
•colocación de alta precisión
•fácil de usar
1. Adopta MCU especial avanzada para control de motor y módulo de potencia PIM, que tiene las características de alta integración, pequeño tamaño, perfecta protección y alta fiabilidad.
2. El algoritmo de control PID optimizado realiza un control digital completo preciso del par, la posición y la velocidad, con una alta precisión y una respuesta rápida.
3. Cuenta con interfaces digitales ricas, soporta el protocolo de comunicación MODBUS, y es conveniente para la conexión en red.
La serie 4. EA196 admite varios servomotores de imán permanente ac con codificadores magnéticos y fotoeléctricos incrementales de 17 bits y codificadores fotoeléctricos absolutos de 23 bits que utilizan el protocolo RA-CODER, cumpliendo con diferentes requisitos de coste y rendimiento.
5. Puede ser ampliamente utilizado en campos de automatización como equipos 3C, maquinaria de impresión y embalaje, maquinaria textil, robots y líneas de producción automatizadas.

| En funcionamiento condiciones | Temperatura | Temperatura de trabajo 0~40°, temperatura de almacenamiento -20° ~85° | |||
| Humedad | Trabajo/almacenamiento: ≤ 90% HR (sin condensación) | ||||
| Altitud | ≤ 1000m | ||||
| Vibración | ≤ 4,9m/s2, 10~60Hz (no se permite ninguna operación en el punto de resonancia) | ||||
| Método de enfriamiento | Refrigeración por ventilador | ||||
| Método de control | SVPWM, control vectorial | ||||
| Seis modos de control | Control de velocidad, control de posición, control de par, control de velocidad/posición, control de par/velocidad, control de posición/par | ||||
| Panel frontal | 5 teclas, LED de 5 dígitos | ||||
| Freno regenerativo | Unidad de freno y resistencia integradas; se puede conectar una resistencia de frenado externa | ||||
| Modo de retroalimentación | codificador incremental de 17 bits/absoluto de 23 bits | ||||
| Entrada/salida digital | Entrada | Arranque de servo, rearme de alarma, compensación del contador de desviación de impulsos de posición, selección de dirección de comando de velocidad, conmutación de varios segmentos de posición/velocidad, activación de comando interno, control Cambio de modo, desactivación de impulsos, desactivación de la marcha adelante, desactivación de la marcha atrás, avance en pulgadas, hacia atrás | |||
| Salida | Servolisto, salida de freno, salida de rotación del motor, señal de velocidad cero, aproximación de velocidad, velocidad alcanzada, aproximación de posición, límite de par, límite de velocidad de rotación, salida de advertencia, salida de alarma. | ||||
| Función de protección | Hardware | Sobretensión, subtensión, sobrevelocidad, sobrecalentamiento, sobrecarga, velocidad excesiva, alarma del codificador, etc. | |||
| Software | Error de posición excesivamente grande, fallo de EEPROM, etc. | ||||
| Función de seguimiento de datos de alarma | Registrar 4 grupos de alarmas históricas y datos relevantes | ||||
| Función de comunicación | RTU Modbus | ||||
| Posición control modo | Pulso de entrada máximo frecuencia | Modo de entrada diferencial: 500Kpps Modo de entrada de colector abierto: 200Kpps | |||
| Modo de comando de pulso | Símbolo de pulso +, pulso ortogonal de fase A y B. | ||||
| Control de comando modo | Comando de pulso externo, comando de posición de varios segmentos | ||||
| Suavizado de comandos modo | Filtrado de paso bajo,filtro FIR,suavizado en forma de trapezoide del comando de posición de varios segmentos | ||||
| Relación de transmisión electrónica | Relación de transmisión electrónica: N/M múltiplos (0,001< N/M< 64000 = N: 1~230, M: 1~230 | ||||
| Precisión de posición | ±1 comando de pulso | ||||
| Con. Velocidad modo de control | Control de comando modo | Pulso externo, comando de velocidad digital, comando de velocidad multietapa, comando de avance lento | |||
| Suavizado de comandos modo | Filtrado de paso bajo, curva S suave | ||||
| Límite de par | Límite de ajuste digital | ||||
| Relación de regulación de velocidad | 1:5000 (codificador de 23 bits) | Velocidad mínima/velocidad nominal de rotación de funcionamiento estable continuo bajo la carga nominal | |||
| Ancho de banda | No menos de 400Hz (codificador de 23 bits) | ||||
| Relación de fluctuación de velocidad | Fluctuación de carga (0-100%) | Máximo 0,1% | Para un codificador de 23 bits, cuando el mando de velocidad es la velocidad nominal de rotación, (velocidad de rotación sin carga - velocidad de rotación con carga completa)/rotación nominal velocidad. | ||
| Cambio de tensión de alimentación ±10% | Máximo 0,1% | ||||
| Temperatura ambiente (0~50ºC) | Máximo 0,1% | ||||
| Par control modo | Control de comando modo | Mando de par digital | |||
| Suavizado de comandos modo | Filtrado de paso bajo | ||||
| Límite de velocidad | Límite de ajuste digital | ||||
| Precisión | ±3% (precisión de repetición de corriente) | ||||








